
图1论文发表
近日,未来技术学院智能制造方向2022级本科生彭智康等五名同学,在校企双导师指导下,以大一项目课程成果“刚柔耦合的软体万能抓手”在期刊Applied System Innovation上发表题为“The Enhanced Adaptive Grasping of a Soft Robotic Gripper Using Rigid Supports”的ESCI收录论文。彭智康同学为论文的第一作者,机械学院彭军教授、郭艳婕高级工程师为共同通讯作者,来自北京软体机器人科技股份有限公司的企业专家技术总监鲍磊参与了论文指导。
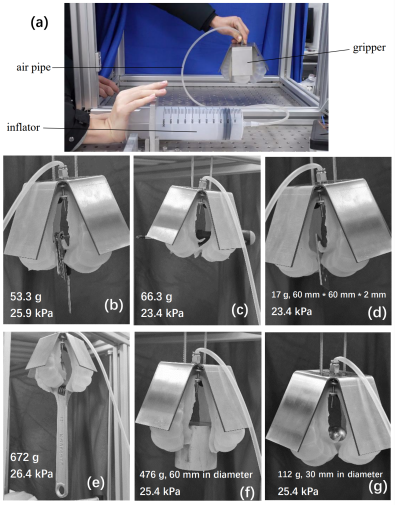
图2抓取物品展示
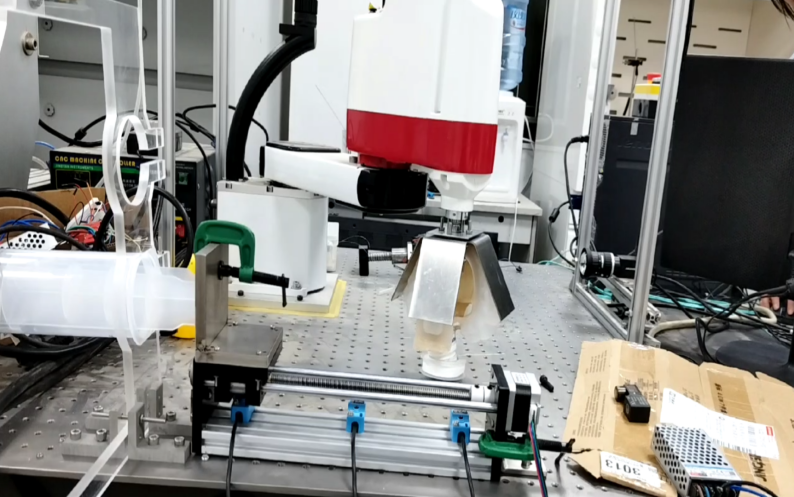
图3电控平台展示
本论文来源于未来技术学院智能制造方向的大一基础项目课程“新形态机器人设计与驱控”,校企双导师在项目课程中开展自主式、研讨式、探究式教学,在“理论授课+项目研讨+动手实践”的过程中提升学生的创造力和动手能力。学生从众多前沿的新形态软爪中选择了PDMS软爪作为研究对象,以小组合作形式从零开始研究制造软爪,从设计模具到倒模,在实践过程中不断的发现问题、调整设计制造流程,一步步实现技术的突破,最终抓取力提升了150%±20%。在未来技术学院及机械学院的共同支持下,学生用该项目课的各种成果积极参加各项创新创业竞赛,也产出了一系列学科竞赛获奖以及专利成果。

图4《新形态机器人设计与驱控》授课团

图5项目课程产出的学科竞赛及专利成果
彭智康说:“通过项目课程的学习,我们小组每个人的收获都很大,首先是专业知识,例如软爪制造、电控、仿真分析、实验表征等专业素养得到很大的提升,然后也积累了一些宝贵的经验,例如项目管理、英文论文撰写、期刊选择、回复审稿人意见等。每一次的尝试都是一次突破,不给自己设限才能开拓属于自己的新天地。最后,特别感谢老师的指导和学院的支持。”

图6彭智康同学风采
未来技术学院深度践行科教融汇、产教融合、协同育人理念,实施本研贯通、项目驱动式人才培养模式。组建了学科交叉、产教融合的校企双师教学团队,创新性地开展“校企导师同上一堂课”,校内老师与企业专家携手指导学生进行基础、初级、中级、高级项目研究。以行业未来技术需求为牵引,优化课程内容,融入科技前沿和产业应用,理论传授与产业实证相结合,形成了思维养成、实践探究的先进教学模式。今后学院将继续积极发挥学校创新人才培养模式的“试验田”作用,深入落实校企融合“双导师制”,在深化科技创新、服务经济社会发展中培养符合未来技术要求的科技创新领军人才。

 设为首页
设为首页 加入收藏
加入收藏

